








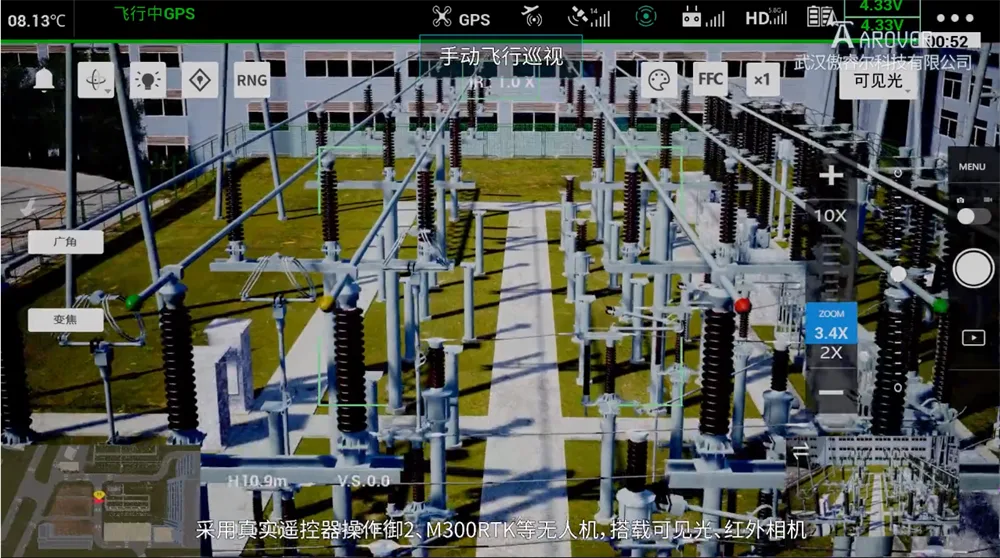



操控真实
模拟器支持 DJI 官方 RC 系列控制器,并兼容各种其他控制器

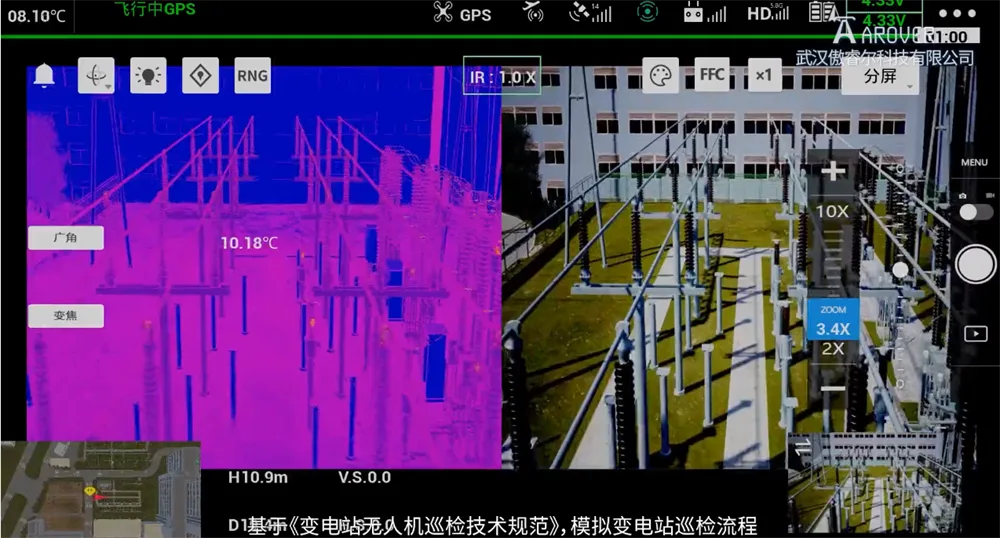
逼真的飞行体验
使用开源模拟器 AirSim 和 Pixhawk 模拟飞行特性和真实的无人机物理

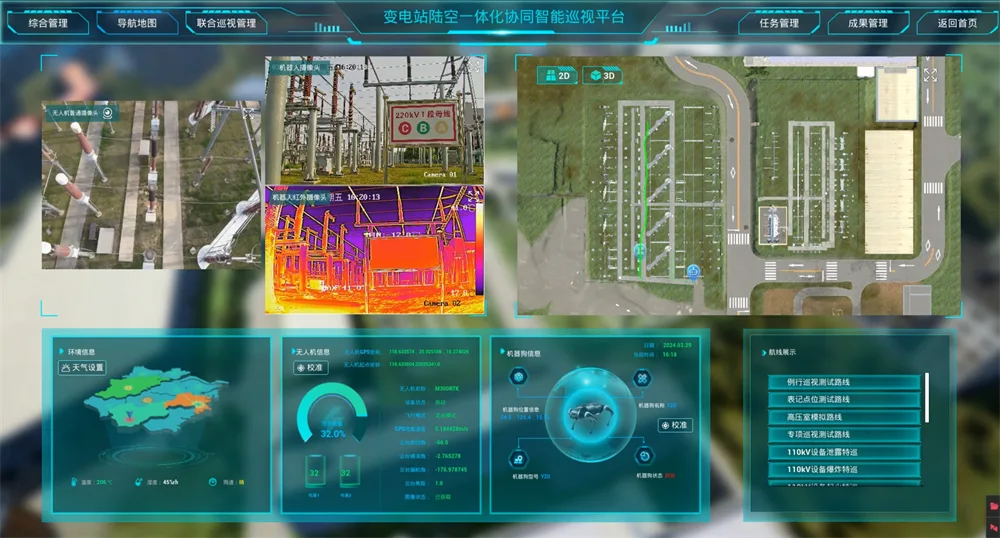
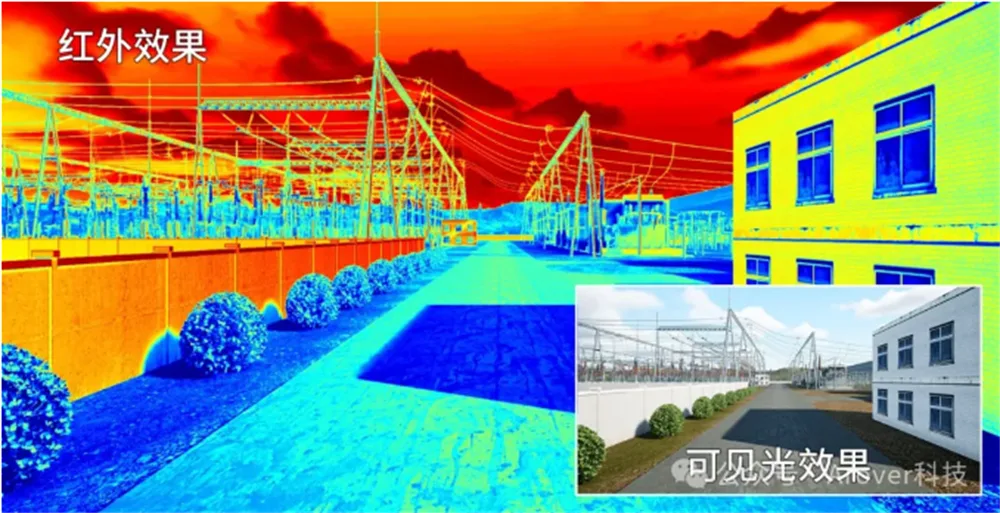
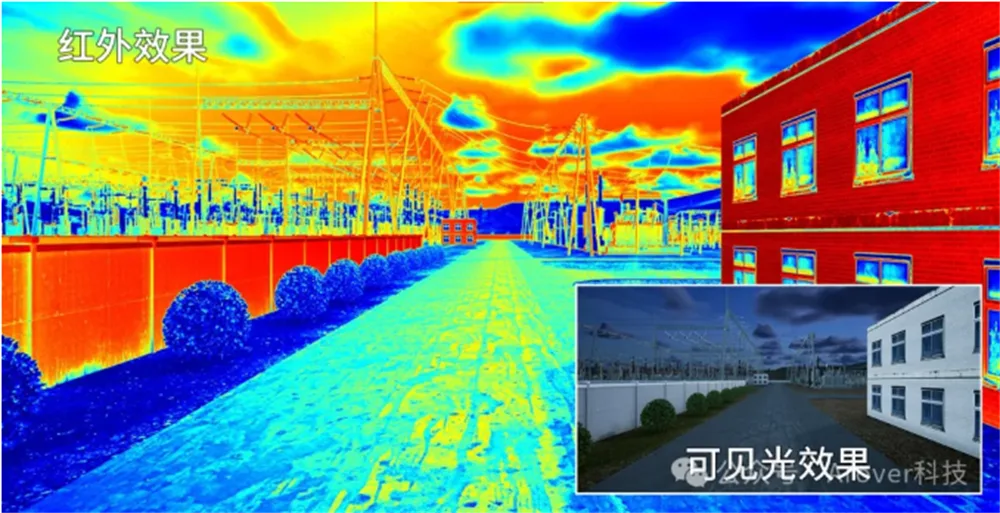
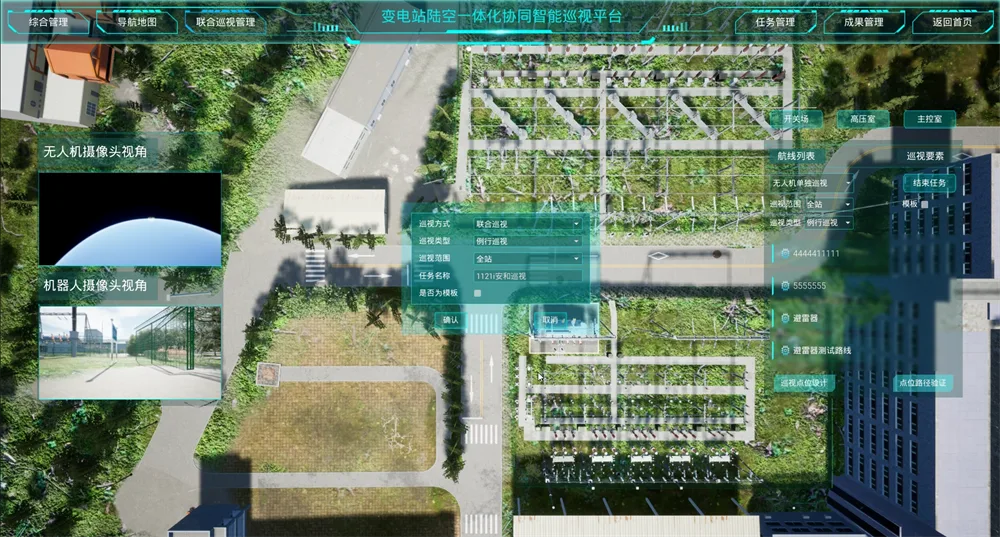
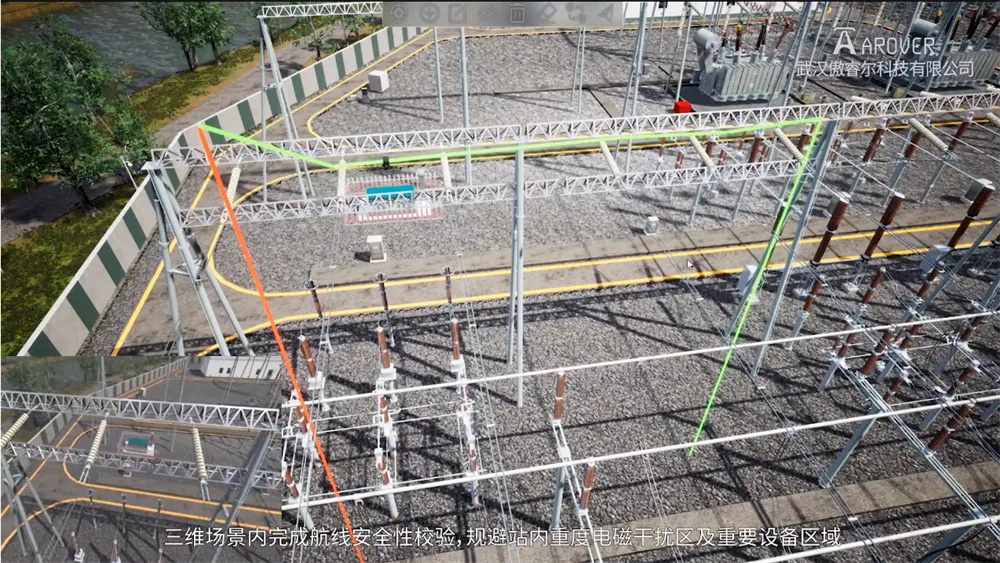
3D真实场景
使用虚幻引擎 4 (UE4) 开发,营造逼真的飞行环境
模拟器支持 DJI 官方 RC 系列控制器,并兼容各种其他控制器
使用开源模拟器 AirSim 和 Pixhawk 模拟飞行特性和真实的无人机物理
使用虚幻引擎 4 (UE4) 开发,营造逼真的飞行环境